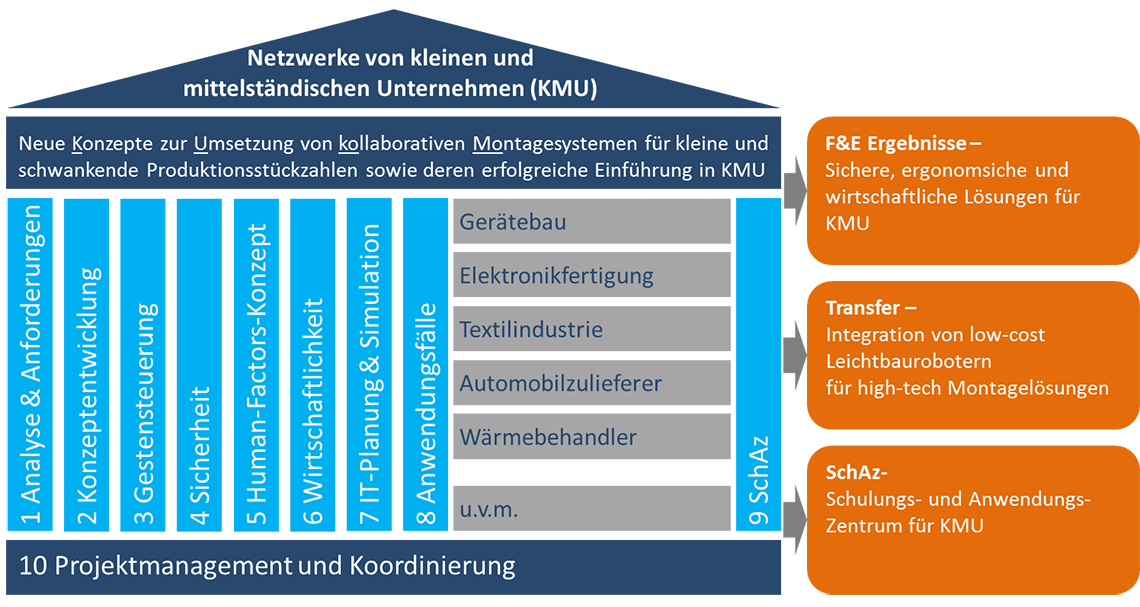
Ziel des Verbundprojektes KUKoMo (Neue Konzepte zur Umsetzung von kollaborativen Montagesystemen für kleine und schwankende Produktionsstückzahlen sowie deren erfolgreichen Einführung in KMU) war es, produzierende Unternehmen des Mittelstandes dabei zu unterstützen, innovative Systemlösungen zur Mensch-Roboter-Kollaboration (MRK) in der Montage zu entwickeln, prototypisch umzusetzen, unter Wirtschaftlichkeitsgesichtspunkten zu validieren und die Ergebnisse anderen potenziellen Nutzern zur Verfügung zu stellen.
Es wurden Leitfäden erstellt, mit denen Montagearbeiten in KMU (kleine und mittlere Unternehmen) auf MRK-Eignung geprüft werden und im positiven Fall anschließend geplant, umgesetzt und in Betrieb genommen werden können. Daraufhin wurden neue Lösungen für Steuerungskonzepte, Greifertechnik und Sicherheitstechnik entwickelt. Die Anwendungsfälle stammten aus den Branchen Elektronikfertigung, Gerätebau, Textilindustrie, Automotive sowie Wärmebehandlung und deckten damit ein breites Spektrum unterschiedlicher Voraussetzungen und Zielstellungen ab.
Pilothafte Umsetzungen wurden im Verlauf des Vorhabens in drei Anwendungsfällen unterschiedlicher Felder demonstriert, während sich zwei Anwendungspartner aufgrund fehlender Wirtschaftlichkeit gegen den Einsatz eines MRK-Systems entschieden.
Dieses vom 01.10.2016 - 31.12.2019 laufende Forschungs- und Entwicklungsprojekt wurde mit Mitteln des Bundesministeriums für Bildung und Forschung (BMBF) im Programm „Innovationen für die Produktion, Dienstleistung und Arbeit von morgen“ (Förderkennzeichen 02P15A020- 02P15A029) gefördert und vom Projektträger Karlsruhe (PTKA) betreut. Die Verantwortung für den Inhalt dieser Veröffentlichung liegt beim Autor.
Die Schaffung einer parametrisierten Schnittstelle zur Objektsteuerung (Musterbeispiel: Industrieroboter) und Entwicklung einer objektübergreifenden hands-free-Lösung für die Einrichtung, Musterkontrolle und Abstimmung von Industrierobotern stellte das erste Entwicklungsziel dar. Dazu sollte eine vorhandene Montagerobotersteuerung über parametrisierbare Schnittstellen für eine Gestensteuerung im Arbeitsumfeld komplexer, technischer Anlagen erweitert werden. Eine solche Integration konnte in Folgeschritten anforderungsabhängig vertieft werden. Der Neuheitsgrad für die Gestensteuerung selbst bestand in seiner objektübergreifenden Mobilität und dem dafür notwendigen minimalen, technischen Aufwand, um eine weitere Interaktionsmöglichkeit dem Bediener zu ermöglichen. Damit waren wesentliche Voraussetzungen für die Nutzung dieser Entwicklung gerade bei KMU gegeben.
 Sicherheit ist eine
grundlegende Voraussetzung bei der
Arbeit an und mit Maschinen. Um ein Höchstmaß an Sicherheit zu gewährleisten, kommen meistens redundante
Systeme zum Einsatz, die das Risiko von verschiedenen Seiten eingrenzen. Für den vorliegenden Fall der
MRK-Systeme wurde daher versucht, einerseits den Roboter mit Werkzeug und Werkstück als Gefahrenquelle
sicherer zu machen und andererseits den Menschen als fehleranfälligen Teil des MRK-Systems besser zu
überwachen.
Sicherheit ist eine
grundlegende Voraussetzung bei der
Arbeit an und mit Maschinen. Um ein Höchstmaß an Sicherheit zu gewährleisten, kommen meistens redundante
Systeme zum Einsatz, die das Risiko von verschiedenen Seiten eingrenzen. Für den vorliegenden Fall der
MRK-Systeme wurde daher versucht, einerseits den Roboter mit Werkzeug und Werkstück als Gefahrenquelle
sicherer zu machen und andererseits den Menschen als fehleranfälligen Teil des MRK-Systems besser zu
überwachen.
 Ein Teilsystem stellte
eine optische Arbeitsraumüberwachung dar, welche durch die Time-of-flight-Methode eine zuverlässige,
günstige und systemunabhängige Lösung bot. Weiterhin wurde die Entwicklung sicherer Greifer verfolgt,
welche z.B. beim Handling von Textilien zum Einsatz kommen. Die detaillierte Definition der zu
entwickelnden Greifer ergab sich aus den Lastenheften der Anwendungsfälle. Das letzte Teilsystem
fokussierte den Menschen als „unzuverlässige“ Komponente des MRK-Systems. Unerwartete Ereignisse (z. B.
laute Geräusche, Herunterfallen von Bauteilen, usw.) können zu spontanem Fehlverhalten und damit
Kollisionen mit dem Roboter führen. Um dieses Risiko zu verringern, sollte ein System entwickelt werden,
welches die Pupillenreaktion überwacht. Da sich die Pupille bei plötzlichen Ereignissen sprunghaft
weitet, kann diese unwillkürliche Reaktion des menschlichen Auges als Notfall-/Abbruchsignal für den
laufenden Prozess genutzt werden. Es stellte sich jedoch heraus, dass die Pupillenreaktion eines jeden
Menschen zu unterschiedlich ist und auch die Reaktion auf Schreckszenarien teils erheblich abweicht,
sodass die Nutzung dieser Eigenschaft als sicheres Signal für einen automatischen Prozess nicht
zuverlässig genug ist um auch als Sicherheitssystem technisch umgesetzt zu werden.
Ein Teilsystem stellte
eine optische Arbeitsraumüberwachung dar, welche durch die Time-of-flight-Methode eine zuverlässige,
günstige und systemunabhängige Lösung bot. Weiterhin wurde die Entwicklung sicherer Greifer verfolgt,
welche z.B. beim Handling von Textilien zum Einsatz kommen. Die detaillierte Definition der zu
entwickelnden Greifer ergab sich aus den Lastenheften der Anwendungsfälle. Das letzte Teilsystem
fokussierte den Menschen als „unzuverlässige“ Komponente des MRK-Systems. Unerwartete Ereignisse (z. B.
laute Geräusche, Herunterfallen von Bauteilen, usw.) können zu spontanem Fehlverhalten und damit
Kollisionen mit dem Roboter führen. Um dieses Risiko zu verringern, sollte ein System entwickelt werden,
welches die Pupillenreaktion überwacht. Da sich die Pupille bei plötzlichen Ereignissen sprunghaft
weitet, kann diese unwillkürliche Reaktion des menschlichen Auges als Notfall-/Abbruchsignal für den
laufenden Prozess genutzt werden. Es stellte sich jedoch heraus, dass die Pupillenreaktion eines jeden
Menschen zu unterschiedlich ist und auch die Reaktion auf Schreckszenarien teils erheblich abweicht,
sodass die Nutzung dieser Eigenschaft als sicheres Signal für einen automatischen Prozess nicht
zuverlässig genug ist um auch als Sicherheitssystem technisch umgesetzt zu werden.

 Während die unmittelbare Arbeitssicherheit
Grundvoraussetzung für die Arbeit mit MRK-Systemen ist, bringt erst eine gute Ergonomie auf Dauer eine
hohe Akzeptanz, gesunde Mitarbeiter, geringere Fehlerhäufigkeiten und damit eine höhere Produktivität,
die sich letztendlich in einen wirtschaftlichen Vorteil münzt. Das ergonomische Konzept und die
enthaltenen Einzellösungen im Projekt richteten sich nach genau diesen Faktoren und beinhalteten die
Optimierung der Mensch-Maschine-Schnittstellen (Steuerung, Bedienelemente, Werkzeugwechsel, etc.).
Während die unmittelbare Arbeitssicherheit
Grundvoraussetzung für die Arbeit mit MRK-Systemen ist, bringt erst eine gute Ergonomie auf Dauer eine
hohe Akzeptanz, gesunde Mitarbeiter, geringere Fehlerhäufigkeiten und damit eine höhere Produktivität,
die sich letztendlich in einen wirtschaftlichen Vorteil münzt. Das ergonomische Konzept und die
enthaltenen Einzellösungen im Projekt richteten sich nach genau diesen Faktoren und beinhalteten die
Optimierung der Mensch-Maschine-Schnittstellen (Steuerung, Bedienelemente, Werkzeugwechsel, etc.).
Es wurde eine methodisch fundierte Studie durchgeführt, welche die Wirtschaftlichkeit und den Nutzen kollaborierender Montagesysteme für KMU in Deutschland aufzeigt. Aus den Ergebnissen wurden Handlungsempfehlungen abgeleitet, die Unternehmen bei der Implementierung kollaborierender Montagesysteme unterstützen. Darüber hinaus dienen die Ergebnisse den roboterproduzierenden Unternehmen als wissenschaftlicher Beleg für die Produktivitätssteigerungen, welche durch deren Technologie ermöglicht wurde. Die Einschätzung der Potenziale und Risiken der kollaborativen Montage von Menschen und Maschine erfolgte induktiv und gliederte sich in die drei Ebenen: Betrieb, Branche und Volkswirtschaft.
Softwaresysteme bilden die Schnittstelle zwischen Menschen und Roboter, sei es zur Parametrierung und Steuerung oder bei der Planung und Gestaltung von Produkten und Prozessen. Im Projekt KUKoMo wurden Auswahlverfahren entwickelt, welche KMU dabei helfen die richtige Software für ihren Anwendungsfall zu finden. Außerdem wurden fehlende Schnittstellen zwischen Hard- und Softwarekomponenten entwickelt, um eine lückenlose System-Integration zu gewährleisten. Die besondere Entwicklungsleistung bestand darin, dass in den Bereichen der Planung und Simulation die MRK parallele Prozesse erfordert – eine Anforderung, der nur wenige Systeme, die häufig ereignisorientiert arbeiten, gerecht werden können.
 Für die Auswahlmethodik wurde daher ein generisches
Kategoriensystem für Aufgaben der MRK entwickelt und validiert, aus dem sich dann – je nach
Aufgabenprofil – Anforderungen an eine Software ableiten ließen. Gemeinsam mit verschiedenen
Unterstützungs-/Nutzungsprofilen der Softwareprogramme ergab sich damit ein durchaus komplexes
Entscheidungsproblem, welches in geeigneter Weise (bspw. Algorithmen, Heuristiken o.ä.) unterstützt
wurde. Die besondere Herausforderung der Schnittstellen, welche forschungsseitig zu lösen waren, bestand
darin, dass keine Lösungen entwickelt wurden, die lediglich zwei verschiedene Komponenten verbinden,
sondern dass generische Schnittstellenkonzepte entstanden, welche flexibel und wiederkehrend durch eine
Vielzahl von Komponenten nutzbar waren.
Für die Auswahlmethodik wurde daher ein generisches
Kategoriensystem für Aufgaben der MRK entwickelt und validiert, aus dem sich dann – je nach
Aufgabenprofil – Anforderungen an eine Software ableiten ließen. Gemeinsam mit verschiedenen
Unterstützungs-/Nutzungsprofilen der Softwareprogramme ergab sich damit ein durchaus komplexes
Entscheidungsproblem, welches in geeigneter Weise (bspw. Algorithmen, Heuristiken o.ä.) unterstützt
wurde. Die besondere Herausforderung der Schnittstellen, welche forschungsseitig zu lösen waren, bestand
darin, dass keine Lösungen entwickelt wurden, die lediglich zwei verschiedene Komponenten verbinden,
sondern dass generische Schnittstellenkonzepte entstanden, welche flexibel und wiederkehrend durch eine
Vielzahl von Komponenten nutzbar waren.
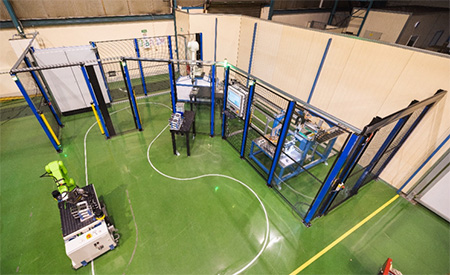 Mit dem im November 2019 eröffneten Schulungs- und
Anwendungszentrum (SchAz) werden interessierten Unternehmen der gewerblichen und industriellen
Wirtschaft Wissen und Praxiserfahrungen in den folgenden Bereichen zugänglich gemacht:
Mit dem im November 2019 eröffneten Schulungs- und
Anwendungszentrum (SchAz) werden interessierten Unternehmen der gewerblichen und industriellen
Wirtschaft Wissen und Praxiserfahrungen in den folgenden Bereichen zugänglich gemacht:
Die breite Palette an Automationstechnologien von verschiedener Sensorik und Aktorik über Kameratechnik, Robotik und Steuerungsvarianten wie auch Sicherheitstechnik ermöglicht das Erforschen und Experimentieren neuer Lösungen. Mit den flexiblen Demonstratoren vor Ort lassen sich Prozesse abbilden und neue Technologien erproben. Thematische Schwerpunkte sind die Entwicklung technologischer Prozesse, Sicherheitskonzepte, intuitive Bedienung sowie der Diskurs zur Wirtschaftlichkeit der Lösungen.
Umfangreiche Informationen sowie Ansprechpartner zum Schulungs- und Anwendungszentrum des ICM e.V. in Chemnitz finden Sie unter www.schaz-chemnitz.de
Alle Erkenntnisse zur Vorbereitung und Umsetzung von MRK-Lösungen sind auf der Website www.mrk-montage.de veröffentlicht. Wesentliche Ergebnisse des Verbundprojektes wurden in dem gemeinsamen Projektatlas „Kompetenz Montage“ Deutschland aufgenommen und damit einer breiten Öffentlichkeit zugänglich gemacht. Die verschiedenen Demonstratoren wurden in das Schulungs- und Anwendungszentrum (SchAz) am ICM e.V. integriert und werden nachhaltig verwertet.
 ICM - Institut Chemnitzer
Maschinen- und Anlagenbau e.V.
ICM - Institut Chemnitzer
Maschinen- und Anlagenbau e.V.Das ICM als private industrienahe Forschungseinrichtung beschäftigt sich seit mehreren Jahren mit Automatisierungslösungen im Bereich des Mittelstandes. Der Trend der "Leichtbauroboter" und deren Potential wurden frühzeitig erkannt. Das ICM kann besonders nah am tatsächlichen Unternehmensbedarf, zwischen Anforderungen der digitalisierten bzw. (teil)automatisierten Produktion und Montage (Anwender) sowie der notwendigen Produktionsressourcen (Ausrüster) vermitteln und agieren. Durch die Zusammenarbeit mit den derzeit 70 Mitgliedsfirmen (Endproduzenten, Zulieferer, Engineering-Dienstleister, Universitäten und Fachhochschulen), Kooperationen mit externen Partnern und die inhaltliche Ausrichtung des Instituts auf verschiedene Arbeitsgebiete des Maschinen- und Anlagenbaus können zusätzliche Synergieeffekten generiert und genutzt werden.
Das Ziel des ICM e.V. als Konsortialführer besteht in der Schaffung der technischen, wirtschaftlichen und organisatorischen Voraussetzungen für MRK in der Montage bei kleinen und mittelständischen Unternehmen. Dazu werden neueste Erkenntnisse mit Hilfe des am ICM aufzubauenden Schulungs- und Anwenderzentrums (SchAz) für potentielle Anwender direkt erfahrbar gemacht. Zum anderen kann das Angebot an Information und Qualifizierung für eine sichere Umsetzung durch Werker, Meister und Wissenschaftler gleichermaßen genutzt und erweitert werden. Die inhaltliche Arbeit des ICM konzentriert sich auf die Entwicklung sicherer Greifersysteme, einem System zur Pupillenüberwachung und dem Einsatz von intuitiven Softwaresystemen zur Steuerung und Simulation von MRK-Systemen.
 Professur für
Fabrikplanung und Fabrikbetrieb der TU Chemnitz
Professur für
Fabrikplanung und Fabrikbetrieb der TU ChemnitzDie Professur für Fabrikplanung und Fabrikbetrieb an der TU Chemnitz arbeitet an neuen Methoden und Werkzeugen für die Planung und den Betrieb energieeffizienter und wandelbarer produktionstechnischer Systeme und Fabriken. Die Fabrik der Zukunft muss reaktionsschnell, wandlungs- und vernetzungsfähig sein. Für die Gestaltung wandlungsfähiger Fabriken mit ihren logistischen Prozessen, Produktions- und Fabriksystemen wurden bereits Lösungswege auf der Basis flexibler und mobiler Fabrikmodule in verschiedenen Veröffentlichungen vorgestellt und geeignete Konzepte und Modelle beschrieben. Die kollaborative Montage ist ein weiterer Schritt zur wandlungsfähigen, vernetzten und digitalen Fabrik. Innovativ und wachstumsorientiert arbeitet die Professur an neuen Methoden und Werkzeugen für die Planung und den Betrieb energieeffizienter und wandelbarer produktionstechnischer Systeme und Fabriken.
Im Verbundprojekt wird die Professur Methoden und Werkzeuge zur Planung und Bewertung von Produktions-, resp. Montagesystemen entwickeln und validieren, die speziell auf die Bedingungen und Anforderungen der Mensch-Roboter-Kollaboration zugschnitten sind. Daneben werden Lösungen zur Integration kollaborativer Montagesysteme in die übrigen Produktionsprozesse sowie ein generisches Schnittstellenkonzept zur Verbindung von unterschiedlicher Hard- und Software erarbeitet.
 HFC Human-Factors-Consult GmbH
HFC Human-Factors-Consult GmbHHFC ist ein privates Forschungs- und Dienstleistungsunternehmen, das für auf die Gestaltung und Auslegung technischer Systeme und Softwareschnittstellen in Hinblick auf Benutzbarkeit, Produkterleben, Akzeptanz oder Sicherheit bei der Interaktion zwischen Mensch und Technik spezialisiert ist. Mit einem interdisziplinären Team, das Kompetenzen aus Psychologie, Ingenieurwissenschaften, Mathematik und Informatik vereint, werden Probleme der Anpassung von Hard- und Software an den Menschen gelöst. Neben der Erarbeitung von Human-Factors-Konzepten ist das Unternehmen auch auf Sicherheitsanalysen und Sicherheitsaudits spezialisiert.
HFC ist Experte für Mensch-Technik-Interaktion und damit besonders qualifiziert, die im Projekt angestrebte Einbindung der Roboter-Technik in die Betriebe im Sinne der Mensch-Roboter-Kollaboration zu gewährleisten. Die Einbindung von Robotern in die Produktion von KMU erfordert eine sorgfältige Berücksichtigung der Arbeitsabläufe sowie der Wünsche und Ängste der Mitarbeiter. Wenn diese nicht berücksichtigt werden und wenn die Mensch-Roboter-Kollaboration nicht im Sinne einer wirklichen Zusammenarbeit zwischen Mensch und Maschine etabliert wird, ist ein Misserfolg der Integration vorprogrammiert. Durch intensive Einbeziehung der Belegschaft und durch intensive Analyse der Arbeitssituation und der spezifischen Anforderungen einer Automatisierung wird HFC eine erfolgreiche Etablierung einer Mensch-Roboter-Kollaboration erzielen.
 IGF
Ingenieurgesellschaft für Gebäude-, Flächen- und Anlagenmanagement mbH
IGF
Ingenieurgesellschaft für Gebäude-, Flächen- und Anlagenmanagement mbHDie IGF-Chemnitz ist ein spezialisiertes, mittelständiges Unternehmen für die Planung, die Ausführung und die Anwenderbetreuung im Facility Management und CAD-Anwendungen mit europaweitem Service.
Zentraler Engpass für den Einsatz von Industrierobotern bei KMU ist häufig die manuelle Programmierung. Sie fordert einen gesteigerten Personalaufwand und eine fortlaufende Weiterqualifizierung des Personals. Es müssen intelligente Programme geschaffen werden, die definierte und gleichzeitig einfach handhabbare menschliche Eingriffs- bzw. Einrichtungsmöglichkeiten bieten. Die Herausforderung liegt darin, über bisherige auditive, visuelle und sensorische Signale hinaus eine objekt- und umgebungsgebundene Gestensteuerung zu schaffen, die für KMU kosteneffizient nutzbar ist. Zielstellung für die IGF GmbH ist daher die Schaffung einer parametrisierten Schnittstelle zur Objektsteuerung (Musterbeispiel: Industrieroboter) und Entwicklung einer objektübergreifenden hands-free-Lösung für Einrichtung, Musterkontrolle und Abstimmung von Industrierobotern.
 iris-GmbH infrared & intelligent sensors
iris-GmbH infrared & intelligent sensors
Die iris-GmbH verbindet Hardware- und Softwareentwicklung zur Schaffung von Sensoren für die Detektion von Personen. Das Unternehmen besitzt auf diesem Gebiet eine langjährige Expertise. Verbunden werden der Entwurf robuster Sensoreigenschaften mit der Entwicklung geeigneter Algorithmen und Systemarchitekturen. Als besonders robuster Ansatz erweisen sich Sensoren, die auf dem TOF-Prinzip beruhen (time of flight). Die iris-GmbH konzentriert die Aktivitäten in den letzten Jahren verstärkt auf diese Technologie.
Ausgehend von der Fähigkeit Personen bzw. Personenbewegungen zu erkennen, fordert die Kollaboration mit Robotern die weitere Verfeinerung der Erkennungsprozesse zur Erkennung und Bewegungsdetektion (resp. der Bewegungsschätzung) von Gliedmaßen (Arme, Hände). Dafür wird die iris-GmbH erweiterte Modelle (Gliedmaßen), Implementierungsstrategien und Kommunikationsprotokolle entwickeln bzw. in geeigneter Form anpassen.
 WätaS Wärmetauscher Sachsen GmbH
WätaS Wärmetauscher Sachsen GmbHDie WätaS Wärmetauscher Sachsen GmbH stellt kundenspezifisch Lamellenwärmetauscher und Glattrohrwärmetauscher in unterschiedlichen Materialkombinationen Kupfer/Alu oder komplett aus Edelstahl 1.4301 und 1.4404 mit einer hohen Fertigungstiefe her.
Für eine dauerhafte erfolgreiche Teilnahme am Wachstumsmarkt steigen die Ansprüche an Kundennähe, Ressourcenverfügbarkeit und Prozesssicherheit. Die Erfordernisse an eine automatisierte Ein-Stück Fertigung werden das zukünftige Herstellungsniveau bestimmen. Moderne Mensch-Roboter Beziehungen im Montageprozess werden im Zentrum zukünftiger Fertigungsmethoden stehen. Die Projektziele definieren einen kollaborativen Herstellungsablauf zur Montage von Lamellen-Grundkörpern und Sammlern sowie deren Fügetechnologien.
 Neustädter Gardinenkonfektion GmbH
Neustädter Gardinenkonfektion GmbHIm Unternehmen werden mehrere hochqualifizierte Mitarbeiter im Bereich der textilen Konfektion eingesetzt. Einige Mitarbeiter haben eine über 20 Jahre bestehende Betriebszugehörigkeit. Durch eine Vielzahl von Marktzugängen (Raumausstattung, B2B – Geschäft, B2C – Geschäft) fließen neue Trends in das Unternehmen ein. Das Unternehmen beschäftigt sich auch mit der Verarbeitung technischer Textilien.
Eine Herausforderung für die Automation sind hier die unterschiedlichen Materialien, unterschiedliche Einstellparameter und eine gewisse Feinfühligkeit im Umgang mit den Materialien. Ziel ist es, wiederkehrende Aufgaben mit Leichtbaurobotern zu automatisieren: die Konfektionierung der Vorhänge sowie das anschließende Bügeln.
 SITEC Industrietechnologie GmbH
SITEC Industrietechnologie GmbHSeit 25 Jahren steht der Name SITEC für eine ausgeprägte Technologieorientierung sowie hohe Innovationskraft im Maschinen- und Anlagenbau sowie der Serienfertigung von Baugruppen und Komponenten. Der Brückenschlag zwischen Technologieentwicklung und kundenbezogener Arbeit im Anlagenbau und der Serienfertigung schafft wertvolle Impulse für Fortschritt und technologischen Vorsprung auf beiden Seiten.
Der konkrete Bedarf der SITEC besteht darin, eine Automatisierungskomponente zu schaffen, die nicht nur den Anlagenbediener in seiner Tätigkeit entlastet, sondern die es durch einfache und intuitive Handhabung (Programmierung), eine modulare Bauweise (in Bezug auf Schnittstellen) sowie die damit einhergehende Mobilität ermöglicht, schnell und flexibel auf Bedarfsspitzen bei Montage- bzw. Serienfertigungsprozessen reagieren zu können. Projektziel der SITEC ist die Entwicklung und Applizierung einer kollaborativen Mensch-Roboter-Interaktion bei der teilautomatisierten Laserbearbeitung von Serienfertigungsteilen.








Ansprechpartner
Dipl.-Hdl. Isabell Grundmann
ICM - Institut Chemnitzer Maschinen- und Anlagenbau e.V.
Otto-Schmerbach-Str. 19
09117 Chemnitz
Email:
Telefon: +49 (0)371/27836-158
Fax: +49 (0)371/27836-104
Internet: www.icm-chemnitz.de